2P Series
Grip Force Min.: 432 N [97 lb]
Grip Force Max.: 3043 N [684 lb]
Stroke Min.: 10 mm [39 in]
Stroke Max.: 30 mm [1.18 in]
Un gripper neumático paralelo acciona dos mordazas en movimiento simétrico mediante aire comprimido, logrando sujeción centrada y estable para tomar, posicionar, sostener y liberar piezas con rapidez y repetibilidad en líneas de producción.
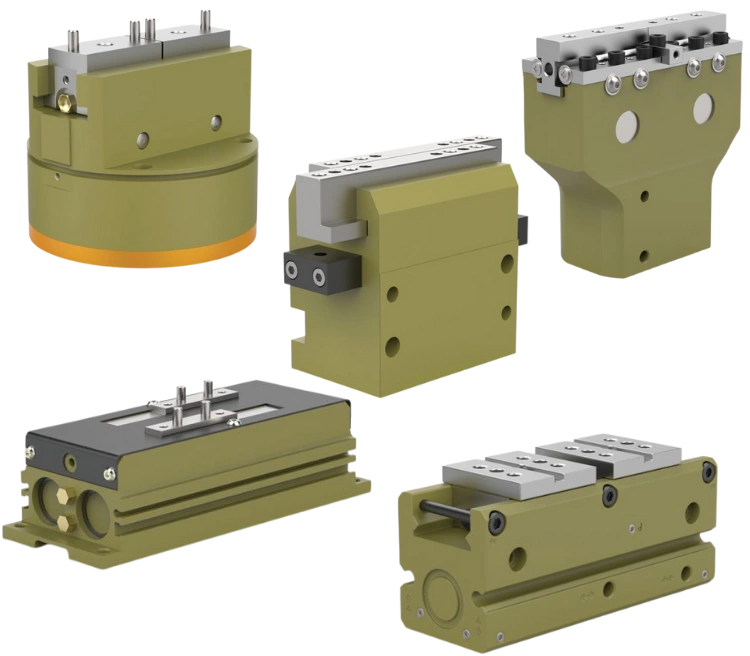
Dentro de esta familia encontrarás variantes compactas, de larga carrera, de alta fuerza, de precisión con baja fuerza de arranque, con guiado reforzado, opciones IP/cleanroom y compatibilidad con sensores y DirectConnect™ para integraciones pick & place multieje sin placas de transición.
Grip Force Min.: 432 N [97 lb]
Grip Force Max.: 3043 N [684 lb]
Stroke Min.: 10 mm [39 in]
Stroke Max.: 30 mm [1.18 in]

Grip Force Min.: 474 N [106 lb]
Grip Force Max.: 2318 N [521 lb]
Stroke Min.: 20 mm [0.787 in]
Stroke Max.: 60 mm [2.362 in]
Grip Force Min.: 474 N [106 lb]
Grip Force Max.: 2318 N [521 lb]
Stroke Min.: 20 mm [0.787 in]
Stroke Max.: 60 mm [2.362 in]

Grip Force Min.: 768 N [173 lb]
Grip Force Max.: 1359 N [306 lb]
Stroke Min.: 40 mm [1.57 in]
Stroke Max.: 70 mm [2.76 in]
Grip Force Min.: 120 N [27 lb]
Grip Force Max.: 227 N [51 lb]
Stroke Min.: 6.4 mm [0.25 in]
Stroke Max.: 25.4 mm [1.00 in]

Grip Force Min.: 107 N [24 lb]
Grip Force Max.: 2224 N [500 lb]
Stroke Min.: 12.7 mm [50 in]
Stroke Max.: 76.2 mm [3.00 in]

Grip Force Min.: 116 N [26 lb]
Grip Force Max.: 160 N [36 lb]
Stroke Min.: 6.4 mm [0.25 in]
Stroke Max.: 25.4 mm [1.00 in]
Grip Force Min.: 116 N [26 lb]
Grip Force Max.: 160 N [36 lb]
Stroke Min.: 6.4 mm [0.25 in]
Stroke Max.: 25.4 mm [1.00 in]

Grip Force Min.: 56 N [13 lb]
Grip Force Max.: 558 N [125 lb]
Stroke Min.: 5 mm [0.20 in]
Stroke Max.: 50 mm [1.97 in]
Grip Force Min.: 56 N [13 lb]
Grip Force Max.: 558 N [125 lb]
Stroke Min.: 5 mm [0.20 in]
Stroke Max.: 50 mm [1.97 in]
Solicita los modelos CAD de los grippers paralelos neumáticos Robohand para integrarlos directamente en tu diseño.
Entregamos archivos en STEP (.stp), IGES (.igs) y DWG/DXF, con datos clave: dimensiones, carrera, fuerza de sujeción, patrón de montaje y opciones de sensores.
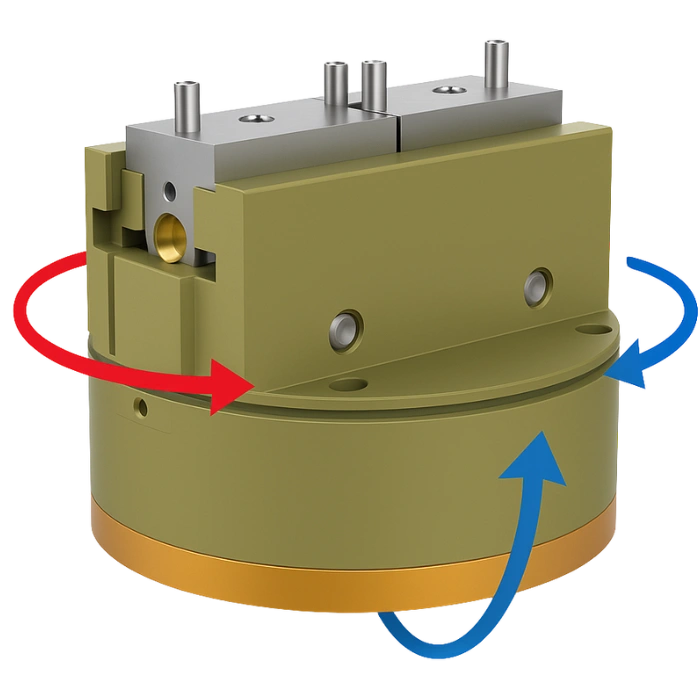
Los grippers neumáticos paralelos mueven sus dos mordazas en forma simétrica, logrando una sujeción centrada y estable. Son ideales para pick & place, ensamble y carga/descarga, ofreciendo alta repetibilidad, ciclos rápidos y fácil integración en celdas robotizadas.
Disponibles en versiones compactas, de larga carrera y alta fuerza, con dedos personalizados para piezas planas, prismáticas o de geometría mixta.
Integran sensores, opciones fail-safe y sellado para ambientes exigentes; resultado: más productividad y menor rechazo.

Descarga el catálogo dedicado a los grippers paralelos neumáticos de Robohand.
Información precisa de fuerzas de sujeción, recorridos, tamaños, sensores y opciones de montaje para integración industrial.

Los grippers paralelos neumáticos destacan en operaciones de pick & place, carga/descarga de máquinas, ensamble y empaque, donde se requiere sujeción centrada, ciclos rápidos y alta repetibilidad. Su versatilidad permite manipular desde piezas frágiles hasta componentes robustos, adaptándose a líneas de inyección de plástico, automatización de fin de línea y celdas robotizadas en sectores como Aeroespacial, Automotriz, Bienes de consumo y Alimentos & Empaque. Integran fácilmente sensores, dedos personalizados y montajes directos para reducir tiempos de cambio y aumentar la productividad.
Moldeo para inyección de plástico